
T1.posix
T1.posix is an add-on for T1.timing
and supports POSIX operating systems.
T1.posix is an add-on for T1.timing
and supports POSIX operating systems.
T1 supports POSIX operating systems through the add-on product T1.posix for T1.timing.
Many operating systems for high-performance computing as well as the AUTOSAR AP standard are based on POSIX.
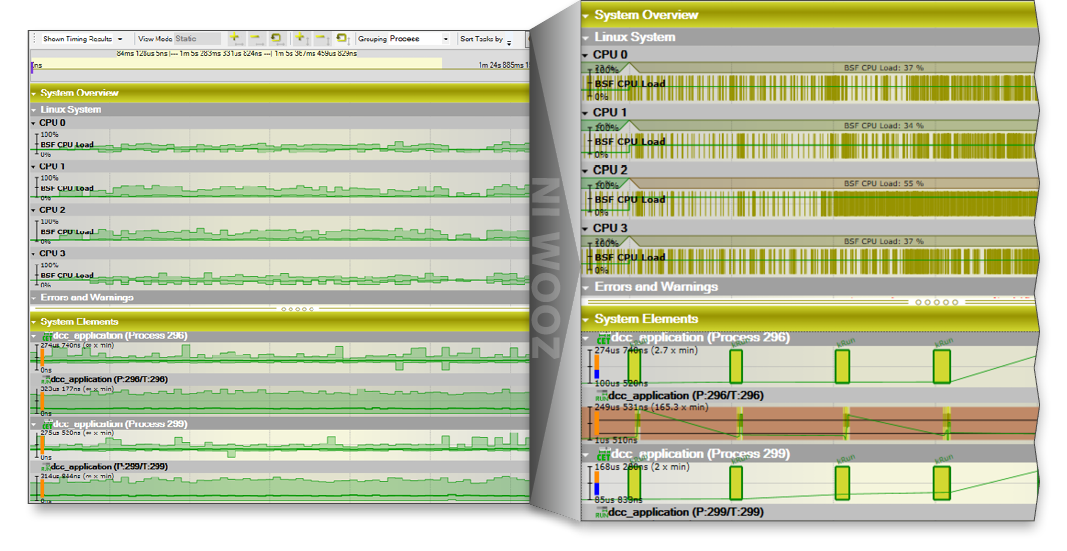
Live streaming of scheduling data from the target ECU
The T1-TARGET-SW traces at run-time and transmits the trace data via Ethernet to the T1-HOST-SW. T1.timing in combination with T1.streaming and T1.posix offers the following benefits:
T1 addresses the needs of the automotive industry by supporting
For RTOS-based projects, see T1.timing.
Each row in the table below represents one set of T1 libraries specific to a certain processor core and a certain compiler.
| Silicon/IP Vendor |
Core Architecture | Compiler | Availability (Variant ID) |
ISO26262 Version Available |
Details | Controller Examples |
|---|---|---|---|---|---|---|
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | GCC | V4.x.x (253) | on request | Linux with GLIBC >= 2.17 | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | qcc | V4.x.x (251) | on request | QNX.7.1 with iopkt network stack | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | qcc | V4.x.x (250) | on request | QNX.7.1 with iosock network stack | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | qcc | V4.x.x (249) | on request | QNX.8.0 with iosock network stack | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | qcc | V4.x.x (252) | on request | QNX.7.0 with iopkt network stack | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| ARM | ARMv8-A: Cortex-A5x, Cortex-A7x | qcc | V4.x.x (252) | on request | QNX.7.0 with iopkt network stack | NVIDIA Tegra, NXP S32G, TI TDAx, etc. |
| Intel | x86 64bit | GCC | V4.x.x (255) | on request | Linux with GLIBC >= 2.17 | Intel Atom Denverton, etc. |
| Intel | x86 64bit | qcc | V4.x.x (254) | on request | QNX.7.0 with iopkt network stack | Intel Atom Denverton, etc. |
| Vendor | Operating System |
|---|---|
| Elektrobit | EB corbos Linux |
| BlackBerry | QNX 7.0/7.1/8.0 |
| Various Vendors | Embedded Linux (e.g. Yocto), Kernel >= 4.14 |
(***) T1 OS adaptation package T1-ADAPT-OS required if 'OS Timing Hooks' are not supported.
| Target Interface | Comment |
|---|---|
| Ethernet (IP:TCP, UDP) | TCP and UDP can be used, IP-address and port can be configured. |
